|






|
|
The Laboratory for Perceptual Robotics is committed to experimental
research regarding robotics and autonomous, embedded systems. Our
facilities for conducting have been assembled with the help of the
National Science Foundation, DARPA, and the State of Massachusetts.
Major components of the infrastructure are listed below.
|
Dexter- the UMass Bi-Manual Dexterity Platform
|
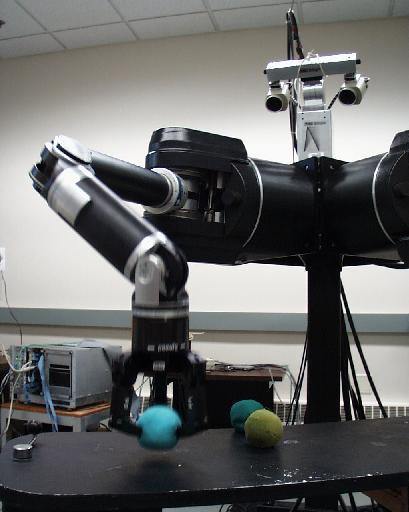
Dexter---the UMass Platform for Studying Bi-Manual Dexterity---consists
of a BiSight stereo head with 4
mechanical and 3 optical degrees of freedom and four microphones
for localizing and interpreting acoustic sources, two whole arm
manipulators (WAMS) are each equipped with a three fingered
Barrett hand with fingertip tactile load cells (ATI). Three VME
cages host the computing system to control the integrated
platform. Research is underway aimed at mechanisms for learning
hierarchical control knowledge - categories of objects,
activities, tasks, and situations - through a continuous
interaction with the environment. We have developed techniques for
exploiting visual and haptic guidance in grasping
and manipulation tasks.
|
|
Mobile Platforms

|
There are a number of mobile platforms being used in the
investigation of distributed robotic sensory systems, including
eight custom designed UMass
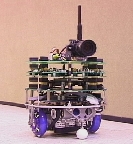
uBots and two iRobot ATRV series robots. The UMass uBot is a
small two-wheeled robot equipped with multiple sensors, including
a Cyclovision panoramic camera, eight Sharp GP2D12 IR proximity
detectors, and acoustic microphones. The main processing unit is a
206 MHz StrongArm Computer. A K-Team Kameleon with an Robotics
Extension Board equipped with a 22Mhz Motorola 68376 Processor is
used for motion control. Communication with the uBots is made
through an onboard Orinoco Wavelan card. The ATRV series robots,
manufactured by iRobot Co. are
four-wheeled mobile platforms equipped with sonar sensors and
wireless ethernet communications. LPR currently has an ATRV-Jr. and an ATRV-mini. We have
attached a panoramic camera to the ATRV-Jr, and a Dell Inspiron
8200 laptop for control. All of our mobile platforms are used in
conjunction with the UMass Humanoid Torso and multiple
pan-tilt-zoom cameras located around the lab to create an ubiquitous
shared information network. These distributed resources are
utilized cooperatively to solve multiple, simultaneous perceptual
and motor tasks.
|
|
Quadruped Platform
|
Multi-legged locomotion platforms present similar challenges to
those of multi-fingered robot hands when it comes to coordinated
motion planning. Coordinated limb movements must serve both
stability and mobility concerns by sequencing the movement of
several independent kinematic chains. There are active communities
considering gait synthesis for walking platforms and now for
manipulation as well, but so far there has not emerged a unified
framework for solving these problems. So we built
Thing
- a small, twelve degree of freedom, four legged walking robot -
to generalize techniques designed for quasistatic finger gaits
with dexterous robot hands to quasistatic locomotion gaits for
quadruped robots.
|
|
Utah/MIT Hand
|
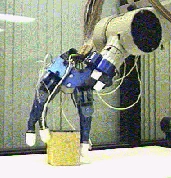
An integrated hand-arm system employs a GE-P50 robot to carry one
of our two Utah/MIT hands and its actuator pack (click to
enlarge). These hands have 4 fingers, each with 4 DOF actuated
independently using 32 pneumatic actuators and antagonistic
tendons. The compute architecture employs an analog controller for
tendon management and a VME/VxWorks distributed controller. This
platform has been used since 1991 to study collision-free
reaching and
grasping
research.
|
|
Stanford/JPL Hand
|
Another GE-P50 carries our Stanford/JPL hand. This hand was
developed by Ken Salisbury in the early 80's. It is a three
fingered hand with three DOF per finger driven by an (n+1) tendon
scheme. Instrumentation includes tendon tension sensors, motor
position encoders, and Brock fingertip tactile sensors. The
fingertip has a minimum force sensing capacity of 0.01 lbf. The
controller is executed on a VME-based open torque control
architecture. Our research on this platform includes haptic models
of the dynamics in the phase portrait of the grasp formation
process. We have been able to show that optimal policies can be
learned that simultaneously acquire haptic models, estimate
control state, and control grasp formation.
|
|
|
|
|
