The uBot-5 is a small and lightweight research platform for mobile manipulation. It was designed to be an economical robot that is highly capable, durable, and safe to operate. The uBot-5 is dynamically stable, using two wheels in a differential drive configuration for mobility. Dynamically stable robots are well suited to environments designed for humans where both a high center of mass and a small footprint are often required. In the case of the uBot-5, which behaves much like an inverted pendulum, active stabilization becomes easier as the robot (and thus the center of mass) becomes taller. The uBot-5 can also employ whole body postural control afforded by its dynamically stable configuration to generate greater pushing and pulling forces than are possible on an equivalent statically stable platform.
Technical Information
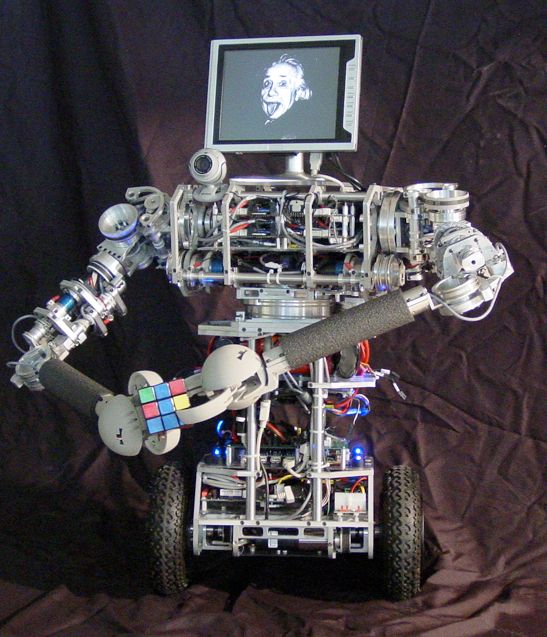
uBot-5 with retrofit uBot-6 head
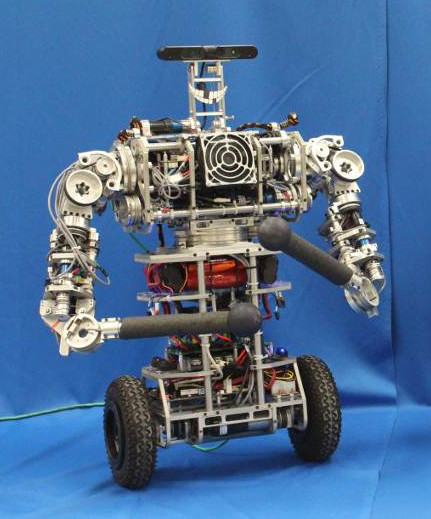
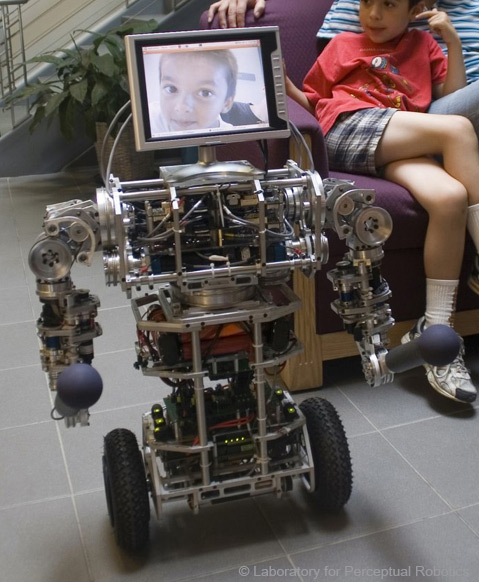
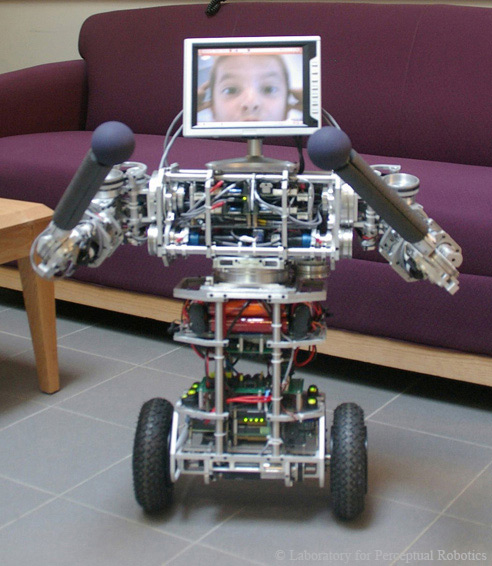
The uBot-5 was designed and built from scratch at the Laboratory for Perceptual Robotics. The robot has 11-dof, 4 in each arm, two wheels, and a rotating trunk. Each joint is actuated using Micromo coreless DC motors. Power is provided by six A123 racing packs. The platform is equiped with a PC/104+ based Pentium computer for high level computation and wireless connectivity. Low level control is provided by a custom 12-channel FPGA based servo controller. The FPGA can update the positions/velocities of all motors at more than 2kHz. An embedded PowerPC core provides low-latency RAW ethernet connectivity and manages low-level reflexes such as balancing and transitions between postural modes. The robot has three heads which can be interchanged depending on the application: a pan/tilt head with stereo cameras, a 8.4" LCD touchscreen with speakers, and a fixed ASUS Xtion PRO.
Since the design of uBot-6, the robot has been refitted with a new head with two coupled tilt joints and an ASUS Xtion PRO RGB-D camera.
Citing uBot-5:
If you would like to cite uBot-5 in your academic publications, we suggest the following citations:
Kuindersma, S., Hannigan, E., Ruiken, D., and Grupen, R. Dexterous Mobility with the uBot-5 Mobile Manipulator, In Proceedings of the 14th International Conference on Advanced Robotics (ICAR). Munich, Germany. June, 2009.
Images
Research Videos
Publications on the uBot platform in general based on predecessor Bot-4
Selected Publications using uBot-5 as experimental platform
Kuindersma, S., Hannigan, E., Ruiken, D., and Grupen, R. Dexterous Mobility with the uBot-5 Mobile Manipulator, In Proceedings of the 14th International Conference on Advanced Robotics (ICAR). Munich, Germany. June, 2009.
Kuindersma, S., Hannigan, E., Ruiken, D., and Grupen, R. Dexterous Mobility with the uBot-5 Mobile Manipulator, In Proceedings of the 14th International Conference on Advanced Robotics (ICAR). Munich, Germany. June, 2009.
Konidaris, G., Kuindersma, S., Grupen, R., and Barto, A. Autonomous Skill Acquisition on a Mobile Manipulator. In Proceedings of the Twenty-Fifth Conference on Artificial Intelligence (AAAI-11), pages 1468-1473, San Francisco, CA, August 2011.
Kuindersma, S., Grupen, R., and Barto, A. Learning Dynamic Arm Motions for Postural Recovery. In Proceedings of the 11th IEEE-RAS International Conference on Humanoid Robots. Bled, Slovenia, October 2011.
Jung, H., Choe, Y., Baird, J., and Grupen, R. A. A Follow-Up on Humanoid-Mediated Stroke Physical Rehabilitation (late-breaking results). In Proceedings of the 7th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Boston, MA, March 2012.
Luis Pineda, Takeshi Takahashi, Hee-Tae Jung, Shlomo Zilberstein, Rod Grupen. Continual Planning for Search and Rescue Robots. 2015 IEEE-RAS International Conference on Humanoid Robots. Seoul, South Korea, November 2015.
Hee-Tae Jung, Richard G. Freedman, Takeshi Takahashi, Jay Ming Wong, Shlomo Zilberstein, Roderic A. Grupen, and Yu-Kyoung Choe. Adaptive Therapy Strategies: Efficacy and Learning Framework. Proceedings of the IEEE International Conference on Rehabilitation Robotics (ICORR). Singapore, August, 2015.