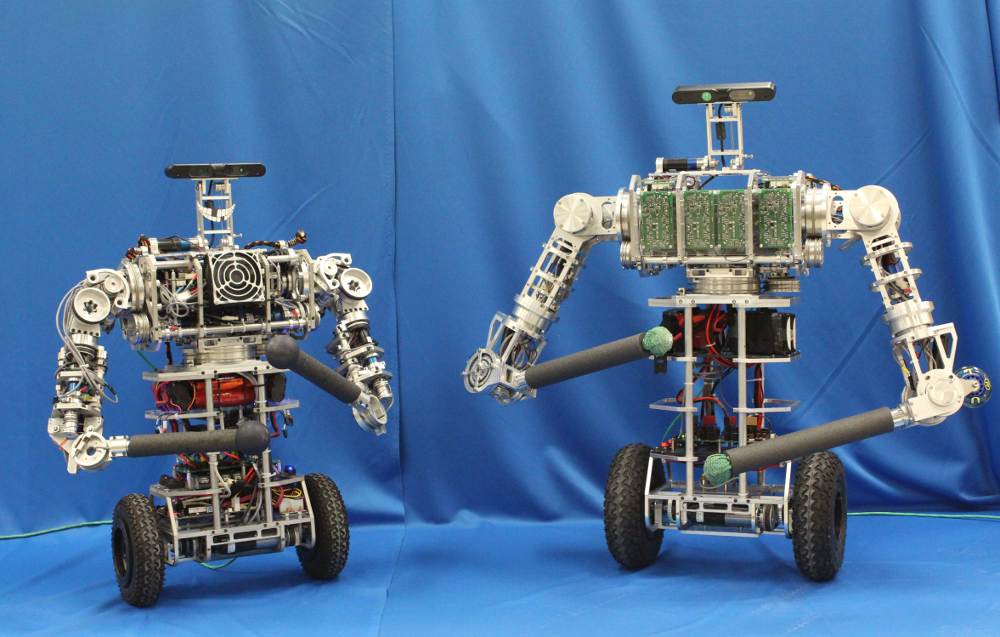
uBot-6 is a toddler-sized mobile manipulator that balances dynamically on two wheels. The robot has 12 degrees of freedom (DOF): two wheels, a rotatable trunk with two 4-DOF arms, and a 1-DOF head. It is 88 cm tall and weighs about 25 kg. The design of uBot-6 is based on critical evaluation of the performance of uBot-5. The redesigned mobile manipulator improves the overall performance by adjusting arm strength and robot size. Compared to uBot-5, there has been at least a threefold increase in strength of all joints. A slightly increased size improves the workspace of the robot. But the biggest change is the addition of new forms of mobility for multi-modal dexterous mobility.
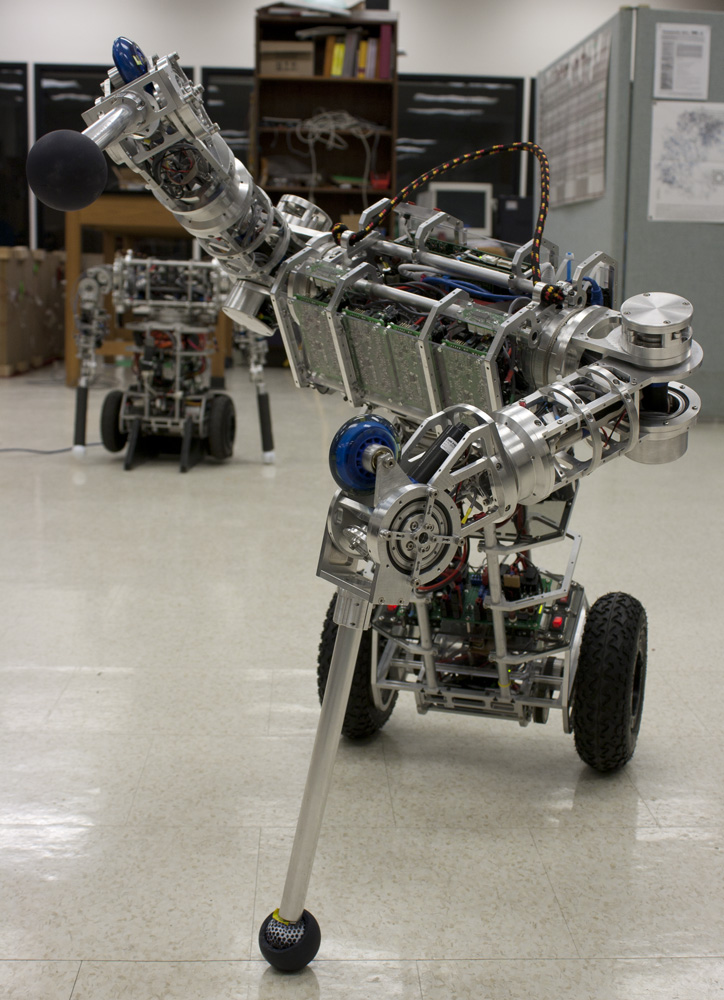
uBot-6 scooting
In its primary form of locomotion the robot is a dynamic balancer on two wheels. The wheels provide non-holonomic drive capabilities with differential steering. Dynamically stable robots are well suited to environments designed for humans where both a high center of mass and a small footprint are often required.
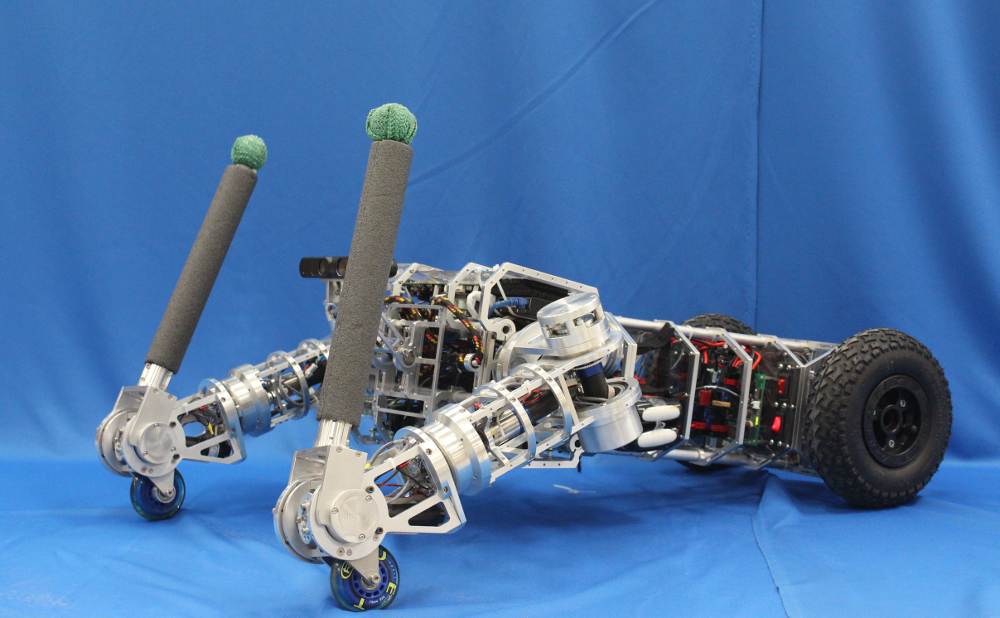
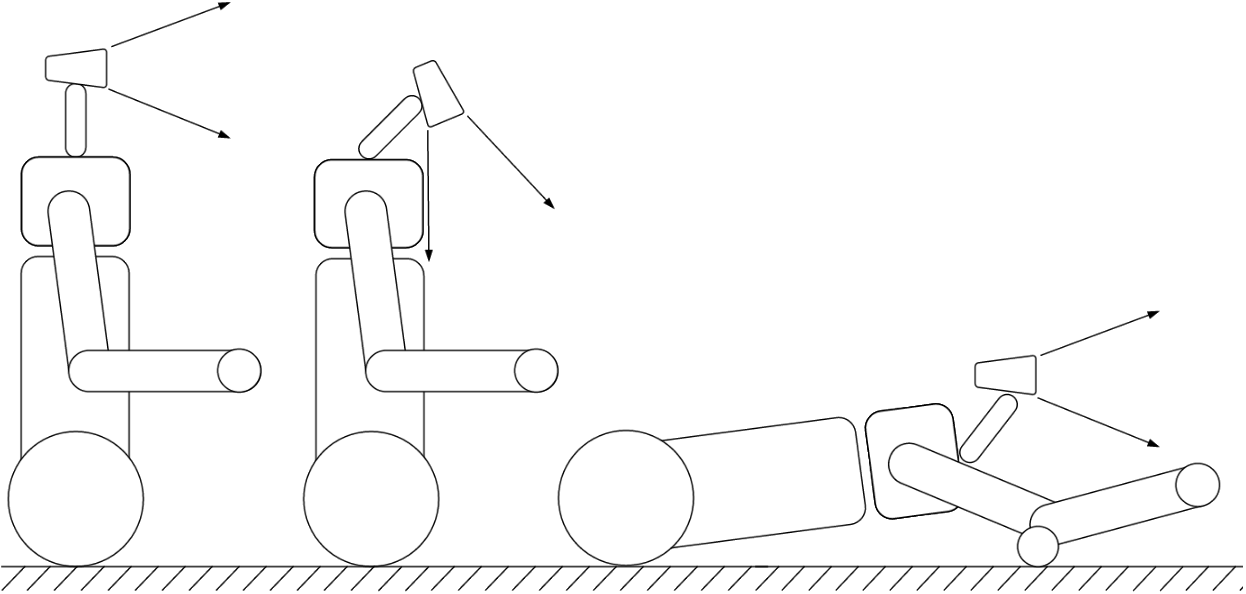
The combined use of arms and wheels for locomotion by kuckle-walking could already be shown on uBot-5 though insufficient arm strength proved a limitation here. While uBot-6 has much stronger arms, its elbows are also equipped with small, unactuated wheels that enable additional postural configurations and corresponding forms of mobility. These wheels enable statically stable four-wheeled locomotion at various body heights. The arms are used to provide Ackermann steering. uBot-6 is capable of transitioning to and between other postural configurations. Each postural configuration provides additional ways to interact with the environment and solve tasks. At the same time they also pose additional requirements to the robot design.
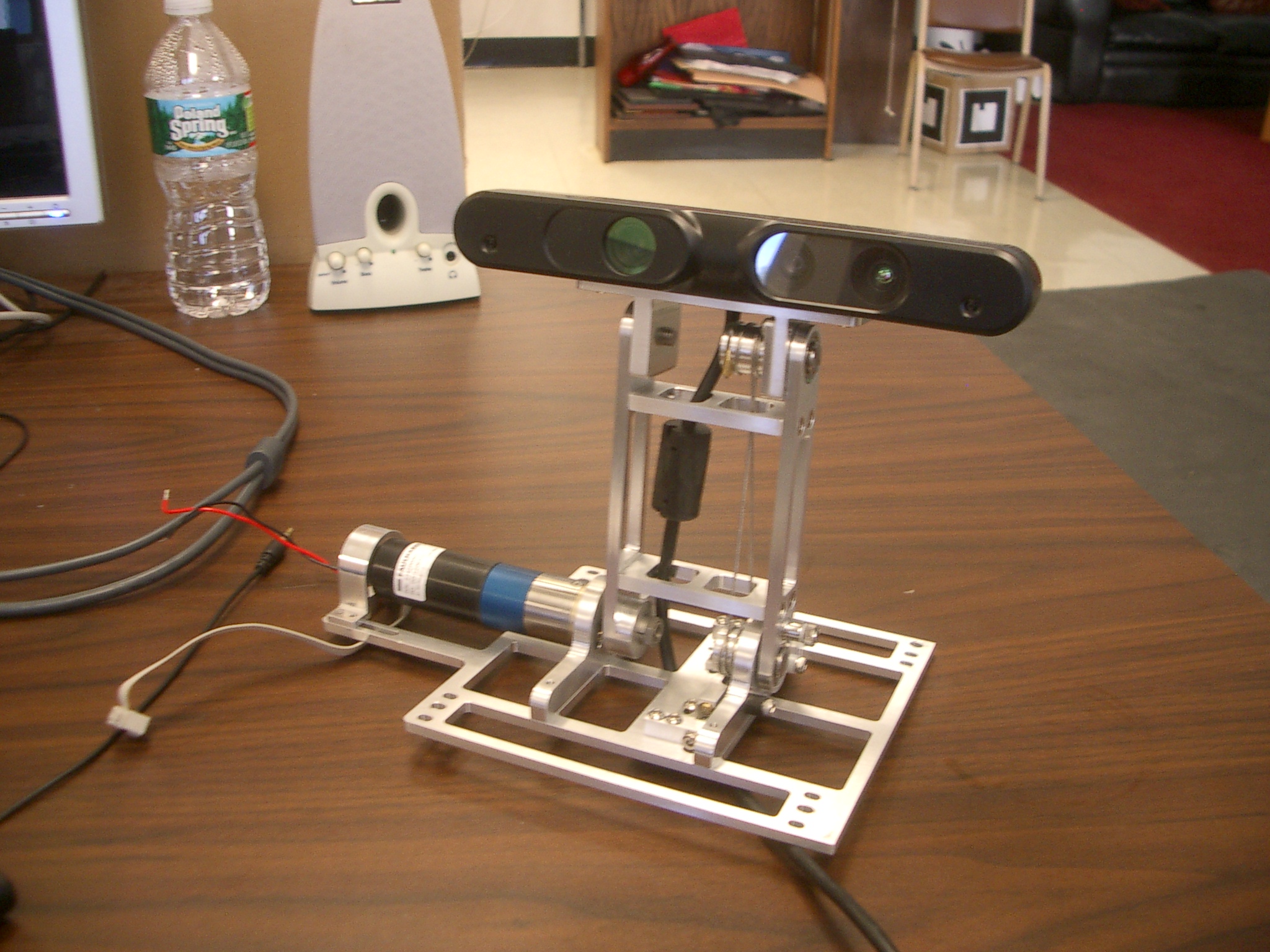
In order to support the needs of the new postural configuration with a near horizontal body, a new head was designed. A coupled tilting mechanism supports camera adjustments for all postural configurations while maximising the field of view of the RGB-D camera.
The robot uses the same high performance low-level motor control based on custom FPGA boards as uBot-5, but on-board computing has been upgraded to a quadcore computer running linux and ROS.
uBot-6 postural configurations and transitions
Citing uBot-6:
If you would like to cite uBot-6 in your academic publications, we suggest the following citations:
For the overall design of uBot-6 and the general concept of postural configurations for multi-modal mobility and dexterous mobile manipulation:
Ruiken, D., Lanighan, M., and Grupen, R., Path Planning for Dexterous Mobility. Proceedings of the 24th International Conference on Automated Planning and Scheduling (ICAPS). Portsmouth, New Hampshire, June 2014.
More details on the different uBot platforms, multi-modal mobility with related path planning, and belief space planning with the uBot-6 platform can be found in:
Ruiken, D., Lanighan, M., and Grupen, R., Path Planning for Dexterous Mobility. Proceedings of the 24th International Conference on Automated Planning and Scheduling (ICAPS). Portsmouth, New Hampshire, June 2014.
Jay Ming Wong, Takeshi Takahashi, and Roderic A. Grupen. Self-Supervised Deep Visuomotor Learning from Motor Unit Feedback. Are the Skeptics Right? Limits and Potentials of Deep Learning in Robotics Workshop at Robotics Science and Systems Conference (RSS), Ann Arbor, USA, June, 2016.
Dirk Ruiken, Tiffany Q. Liu, Takeshi Takahashi, and Roderic A. Grupen. Reconfigurable Tasks in Belief-Space Planning. Workshop on Integrating Multiple Knowledge Representation and Reasoning Techniques in Robotics (MIRROR-16) at IROS 2016, Daejeon, Korea, October, 2016.
Kyle Hollins Wray, Dirk Ruiken, Roderic A. Grupen, and Shlomo Zilberstein. Log-Space Harmonic Function Path Planning. In Proceedings of the 2016 International Conference on Robotics and Systems (IROS), Daejeon, Korea, October, 2016.
Dirk Ruiken, Jay Ming Wong, Tiffany Q. Liu, Mitchell Hebert, Takeshi Takahashi, Michael W. Lanighan, and Roderic A. Grupen. Affordance-Based Active Belief: Recognition using Visual and Manual Actions. In Proceedings of the 2016 International Conference on Robotics and Systems (IROS), Daejeon, Korea, October, 2016.
Michael W. Lanighan, Takeshi Takahashi, and Roderic A. Grupen. Robust Simple Assembly via Hierarchical Belief Space Planning. Workshop on POMDPs in Robotics: State of The Art, Challenges, and Opportunities at Robotics: Science and Systems 2017. Boston, MA, USA, July 2017.
Michael W. Lanighan, Takeshi Takahashi, and Roderic A. Grupen. Planning Robust Manual Tasks in Hierarchical Belief Spaces. Proceedings of the 28th International Conference on Automated Planning and Scheduling (ICAPS). Delft, The Netherlands, June 2018.