
RobotsThe Laboratory for Perceptual Robotics uses several robot platforms for their research. Mobile Manipulators: uBot SeriesThe uBot series has been developed by the LPR to create small and lightweight research platforms for mobile manipulation. The robots are designed to be very economical while also highly capable, durable, and safe to operate. The development started as part of a class project from uBot-0.5 to uBot-3. uBot-2 introduced dynamic balancing and uBot-3 added simple arms.   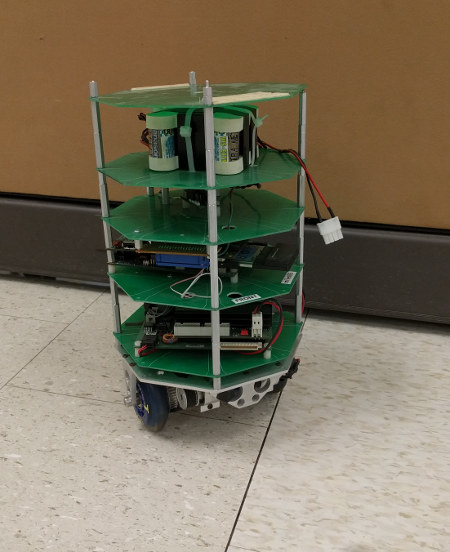 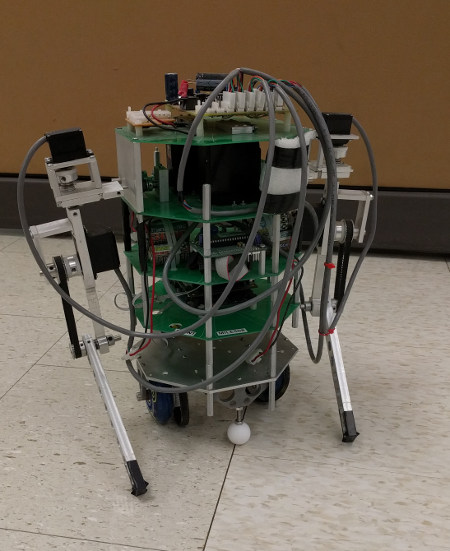 uBot-4uBot-4 was the first version of the platform with full design and custom machined frame. It was very promising though several limitations in the body design directly prompted a redesign for the next version.  uBot-5uBot-5 combines great arms from uBot-4 with a new body. Over the years this robot has been retrofit with various new head designs. Currently it is mainly used as a demonstration platform for tours. 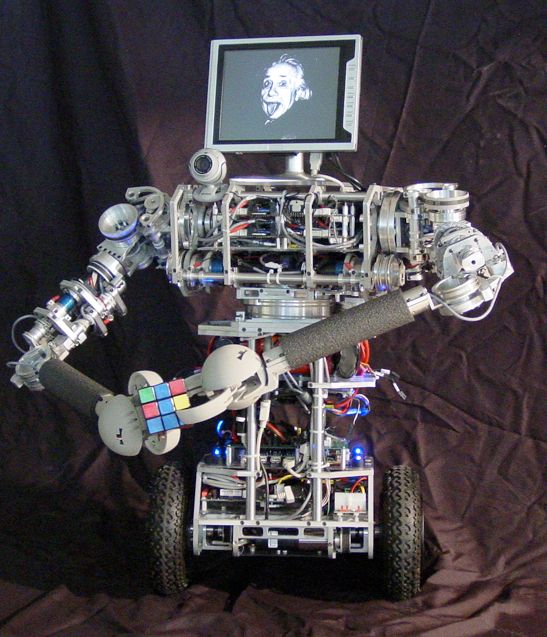  uBot-6uBot-6 is a complete redesign that increases the overall body strength and increases the range of motion. The addition of passive wheels on the elbows of the robot enable multi-modal mobility as the robot can transition between different postural configurations. This platform is currently the main research platform for experiments. 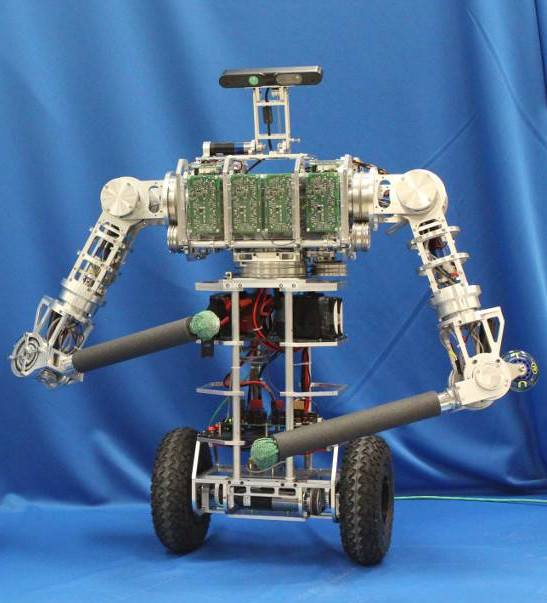 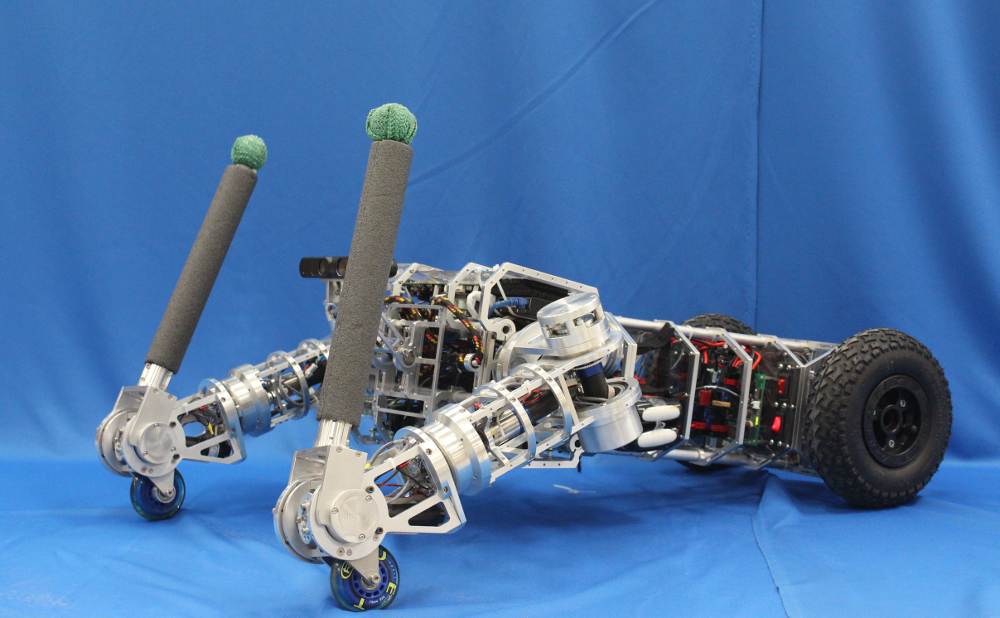  uBot-7uBot-7 is the newest version that extends the uBot with series elastic actuators, a more versatile head, and a new control architecture. This robot is still under development. Though hardware development has been completed, there remains more software integration.development. 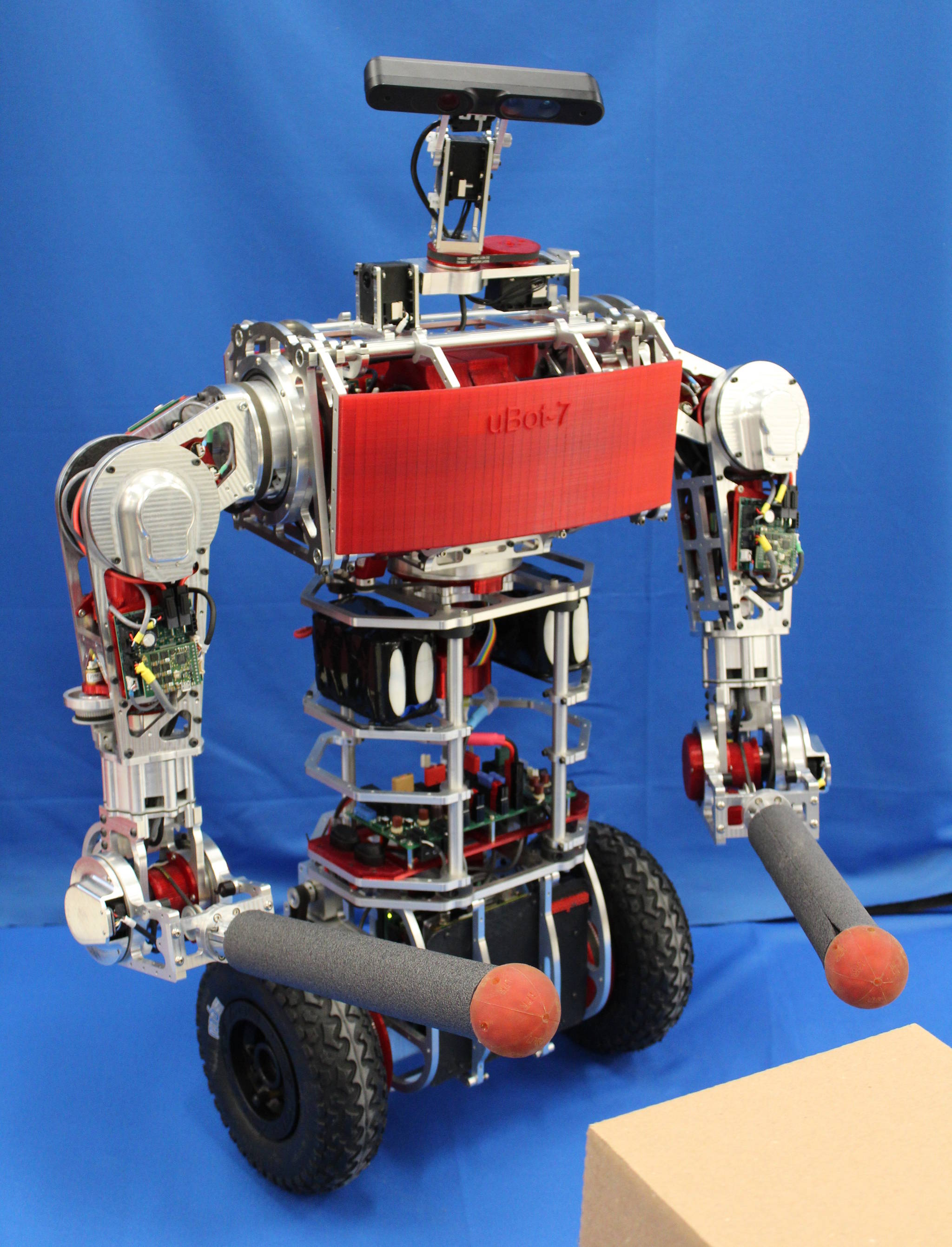 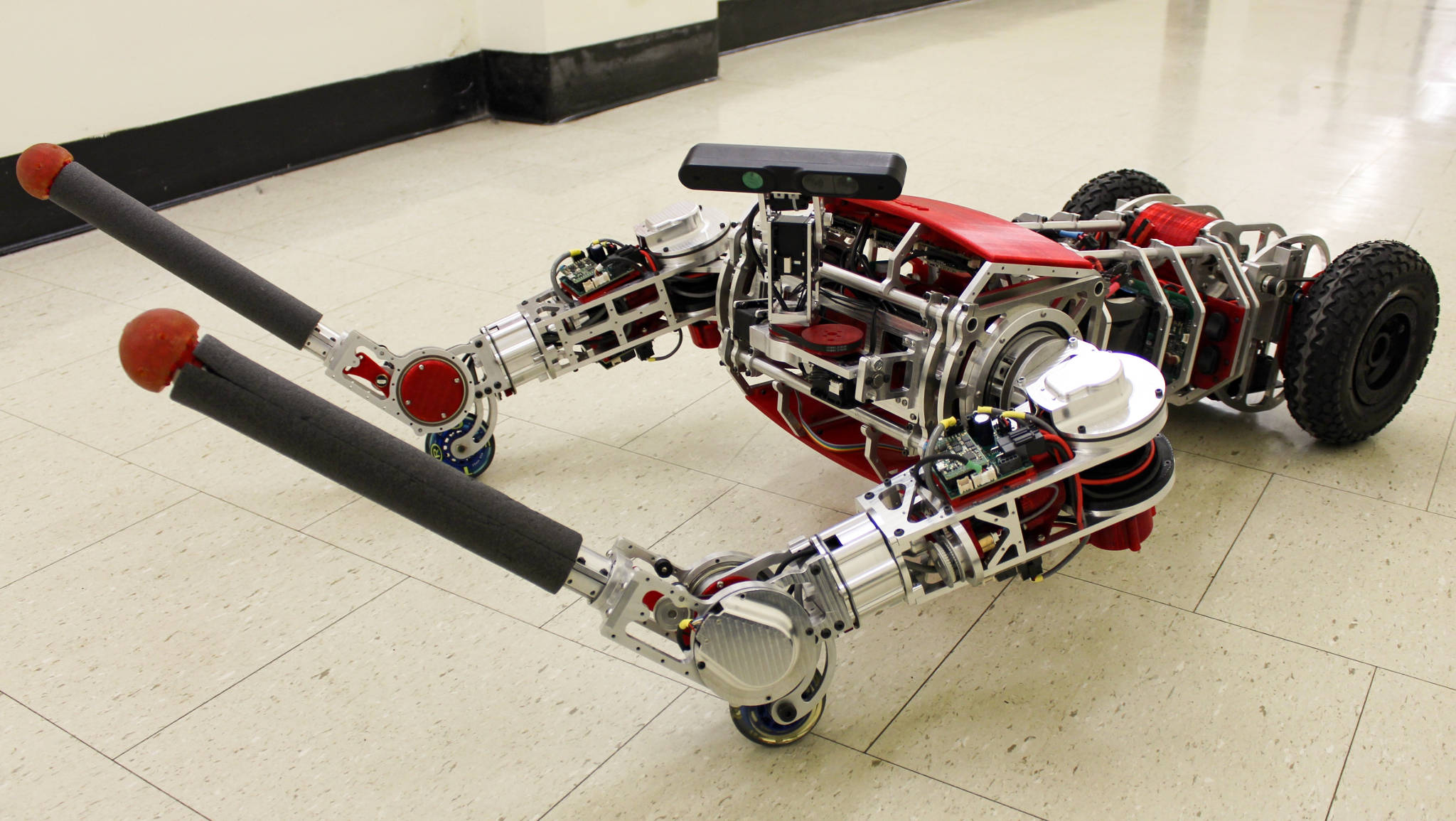 DexterDexter has been the platform for manipulation research since 1997. Its design has since inspired many similar robot setups including the experimental platforms for the DARPA ARM-S program. Two Barrett WAM arms and a stereo head are combined into a bimanual platform. Barrett hands with three fingers and ATI force-torque sensors at the fingertips support dexterous grasping and manipulation of objects.  |