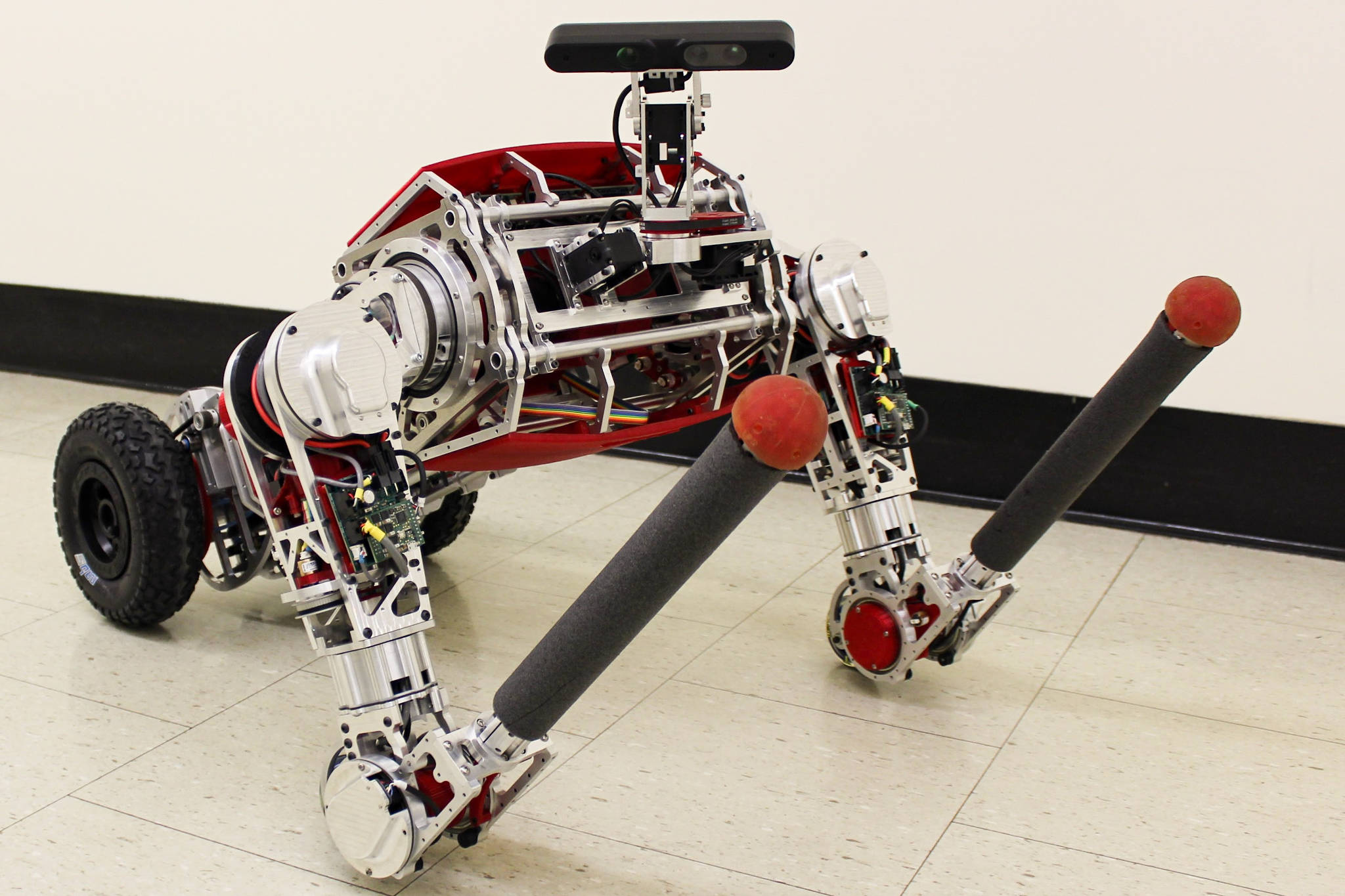
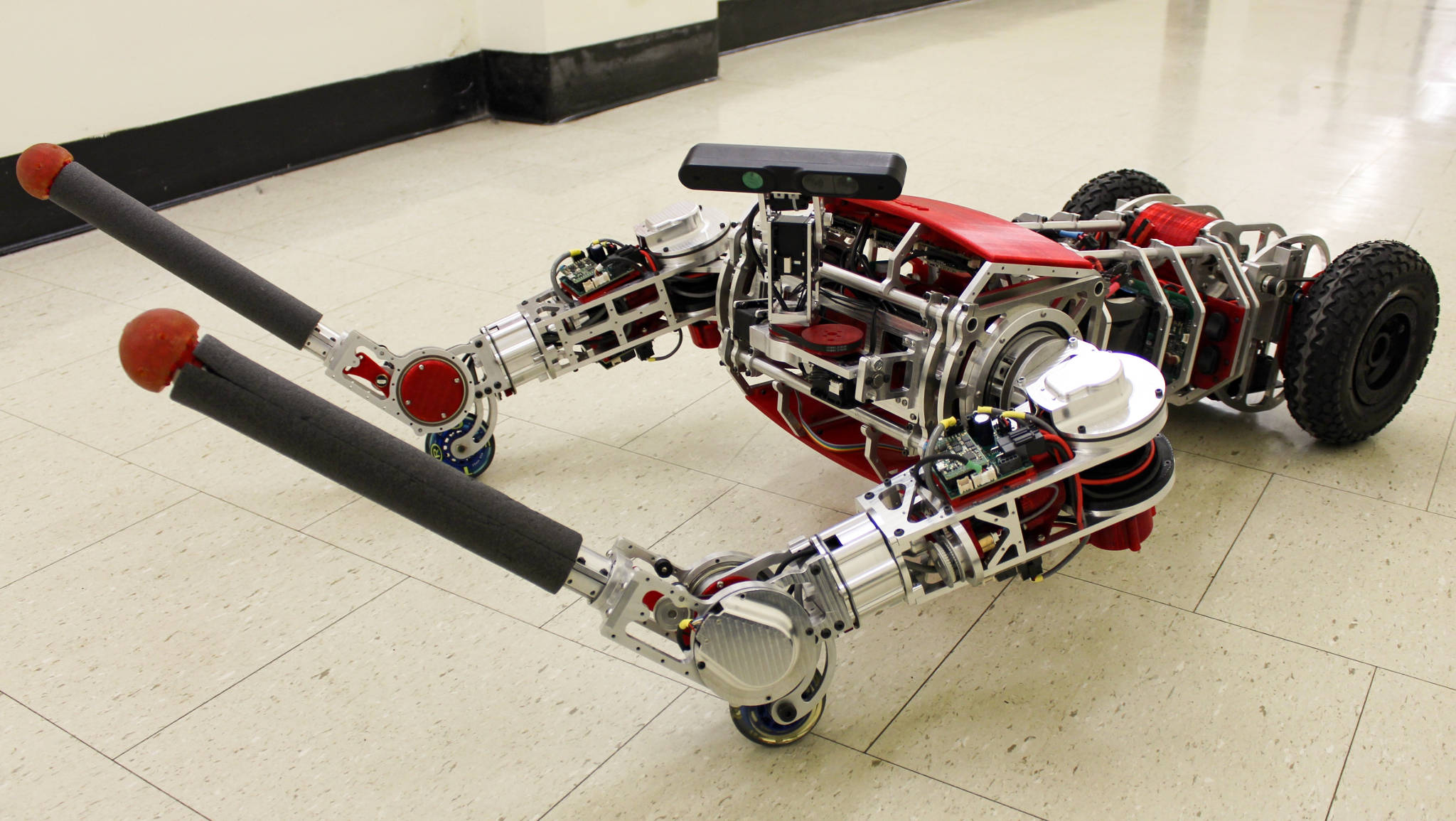
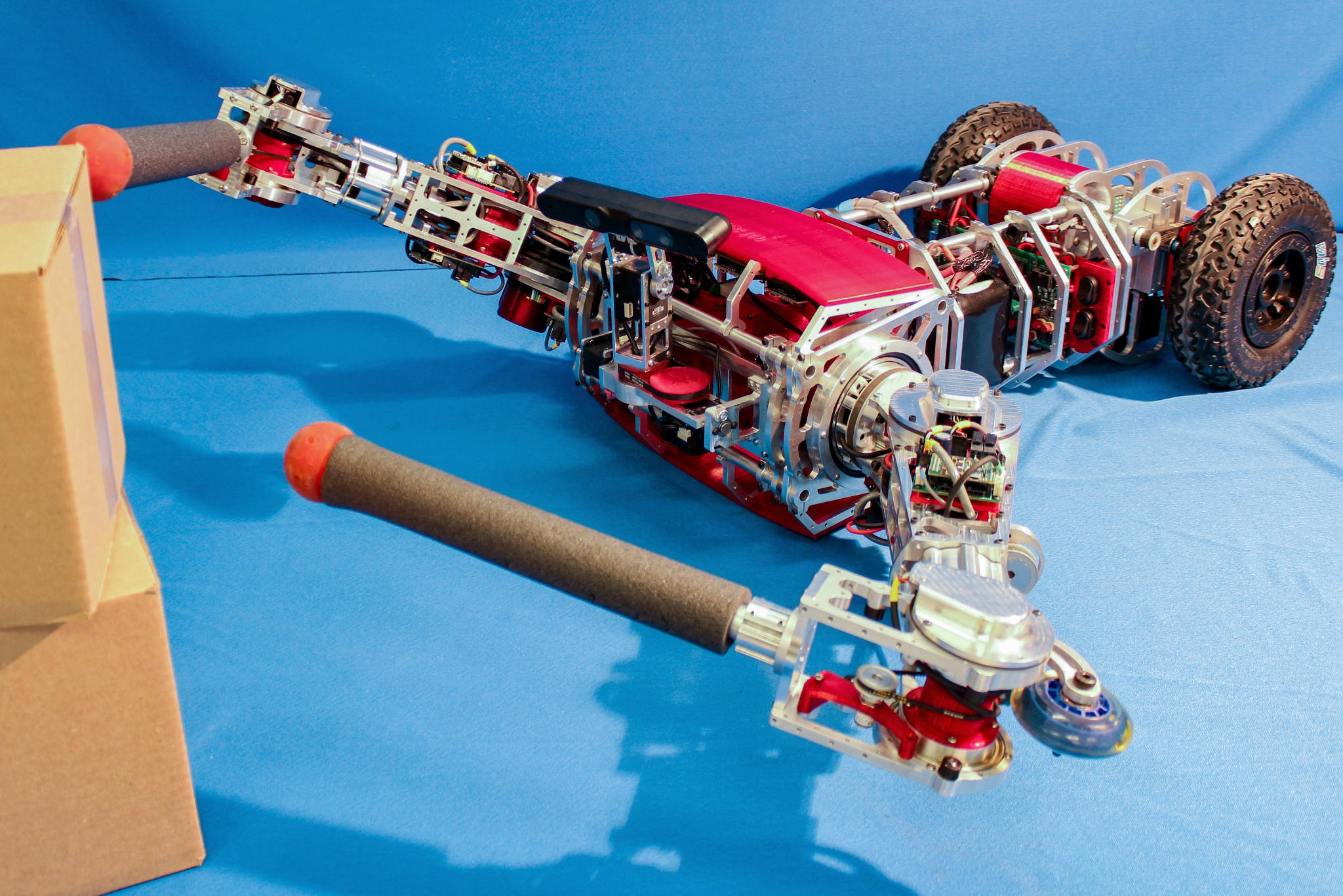
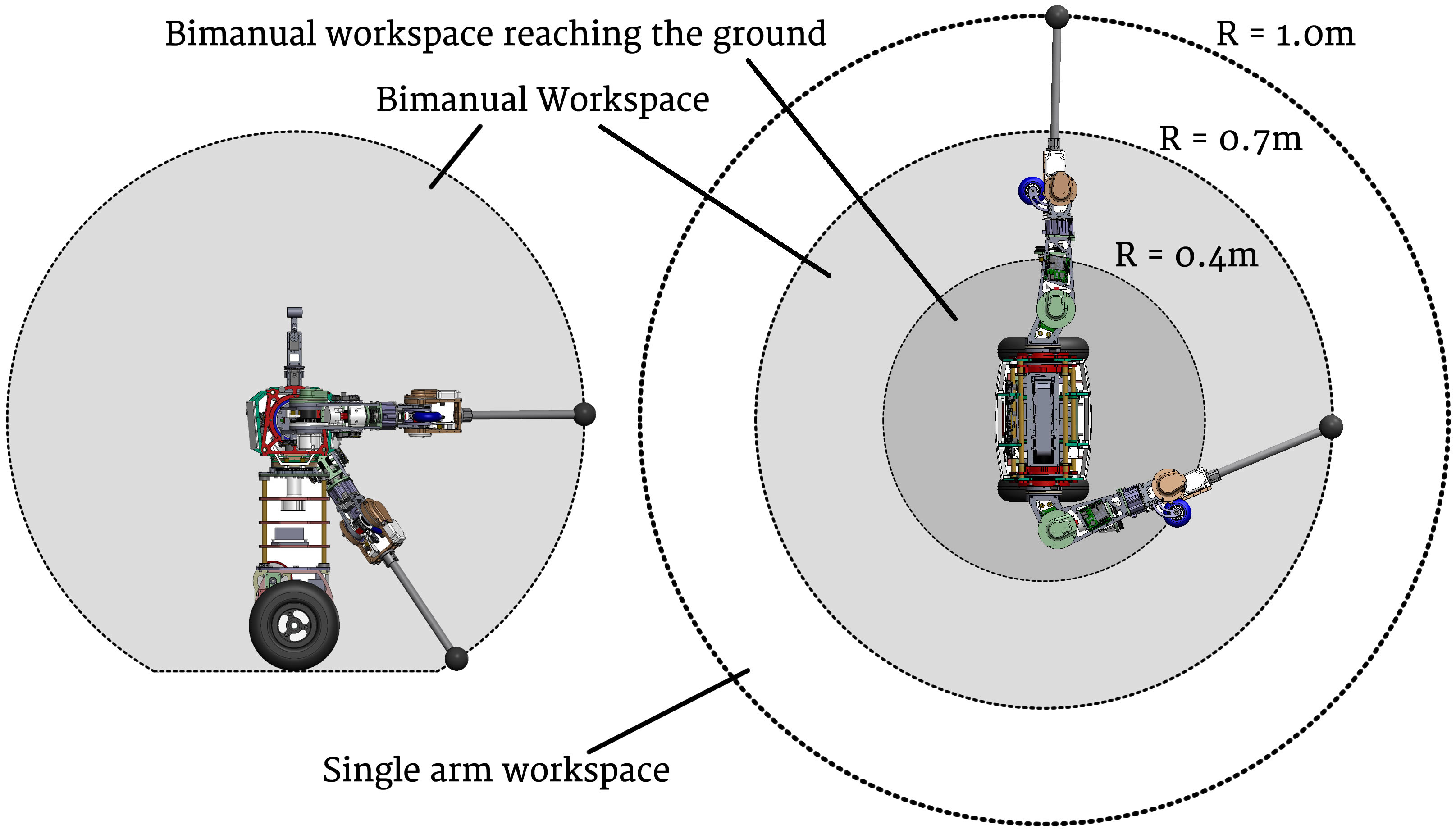
uBot-7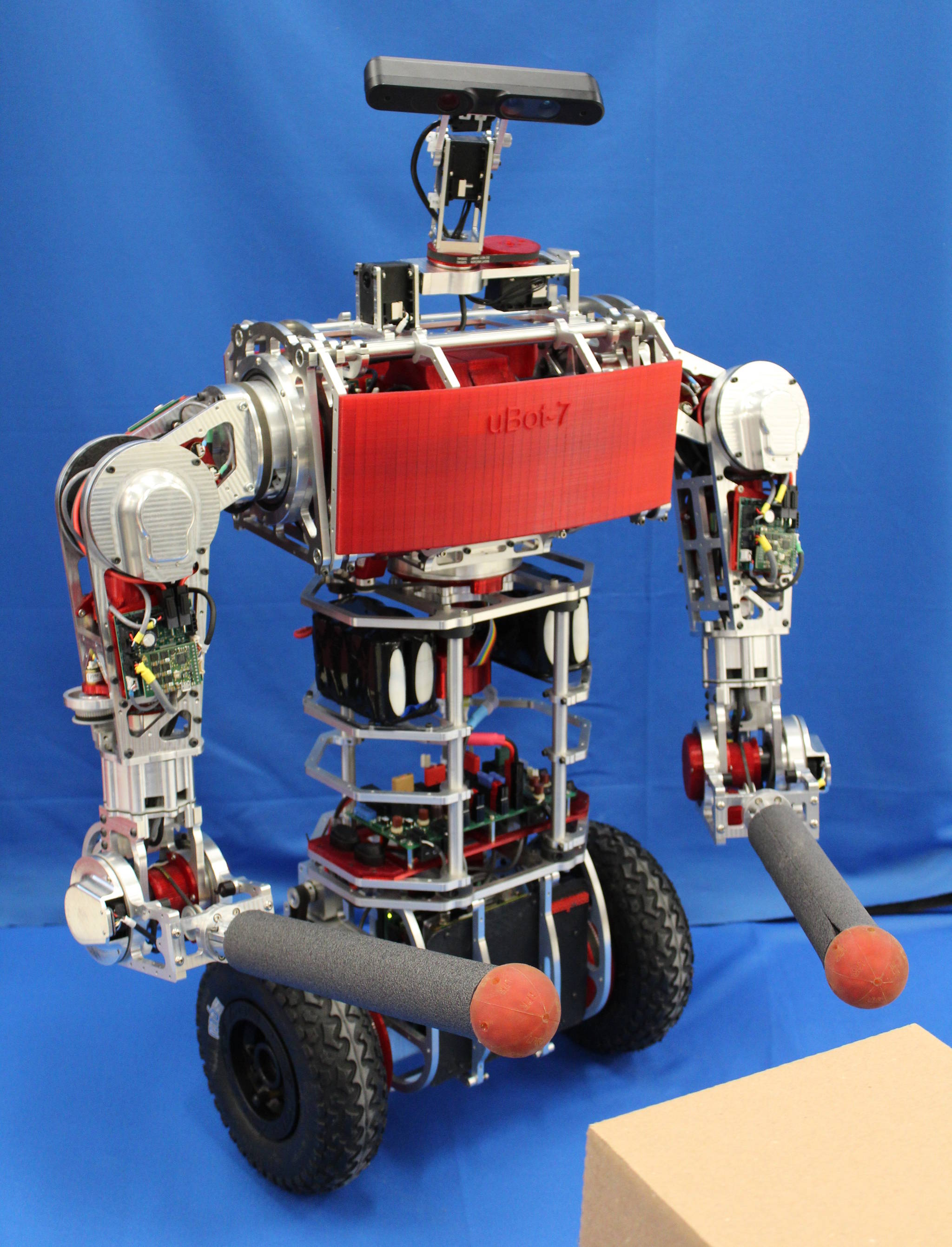 uBot-7 The uBot-7 mobile manipulator is the newest member of the uBot series. The robot design is aimed at providing a mobile manipulator with great versatility to solve tasks in mobility and manipulation. The design is based on experiences from previous uBot generations, especially uBot-6. Like uBot-5 and uBot-6, it is a toddler sized robot capable of dynamically balancing on two wheels. It has 14 degrees of freedom, is 95 cm tall, and weighs about 27 kg. As improvements over uBot-6, the arm and torso joints are driven by series elastic actuators (SEAs) for better sensing and safer interaction around humans. Upgrades to stronger brushless DC motors improve the strength of the robot more than twofold. The head has been extended with two additional motors and now offers independent viewpoint control of the RGB-D camera for all postural configurations of the robot. Finally, a new drive train removes backlash from the base wheels while providing more torque and speed. In its primary form of locomotion the robot is a dynamic balancer on two wheels. The wheels provide non-holonomic drive capabilities with differential steering. Dynamically stable robots are well suited to environments designed for humans where both a high center of mass and a small footprint are often required. Just like uBot-6, it is capable of transitioning to and between other postural configurations. Each postural configuration provides additional ways to interact with the environment and solve tasks. At the same time they also pose additional requirements to the robot design. The improved head mechanism accomodates many of these requirements in order to extend the capabilities to interact with the environment and solve tasks in any postural configuration. The addition of SEAs to all arms and torso joints extends the passive, anisotropic impedance character of its base into an active impedance character in the upper body. Open Source DesignThe design of uBot-7 is available as open source. The CAD models are organized in several GIT repositories:
The design of the motor controllers and the ROS software will follow soon. Citing uBot-7:If you would like to cite uBot-7 in your academic publications, we suggest the following citations: For the overall design of uBot-7:
For details on the modular SEA package:
Images(right click image and select view to see larger)
Selected Publications
|